04-本地简易气象站
气象站是物联网的基础,主要是将检测到的本地信息通过路由器上传到云端,从物联网平台对数据有直观显示。当然一般的气象站都带显示功能,介于我们手头没有显示器件,就用舵机与表盘来直观展示。
知识目标

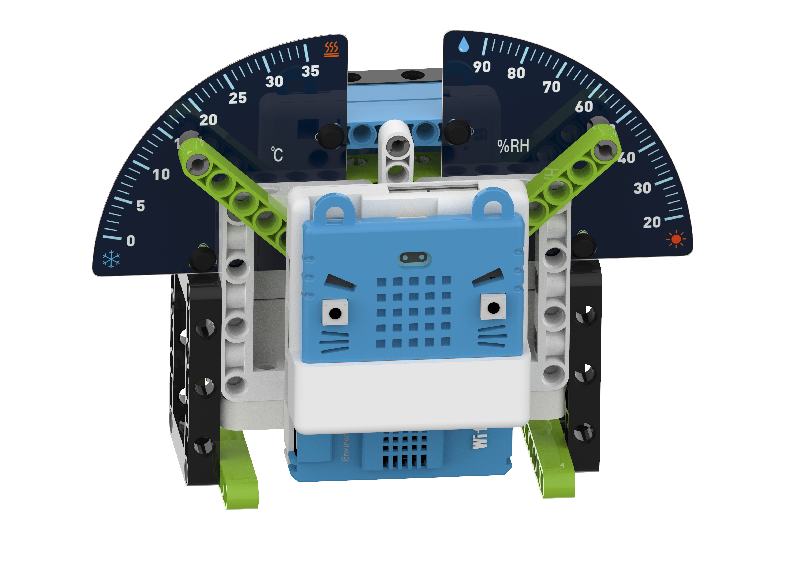
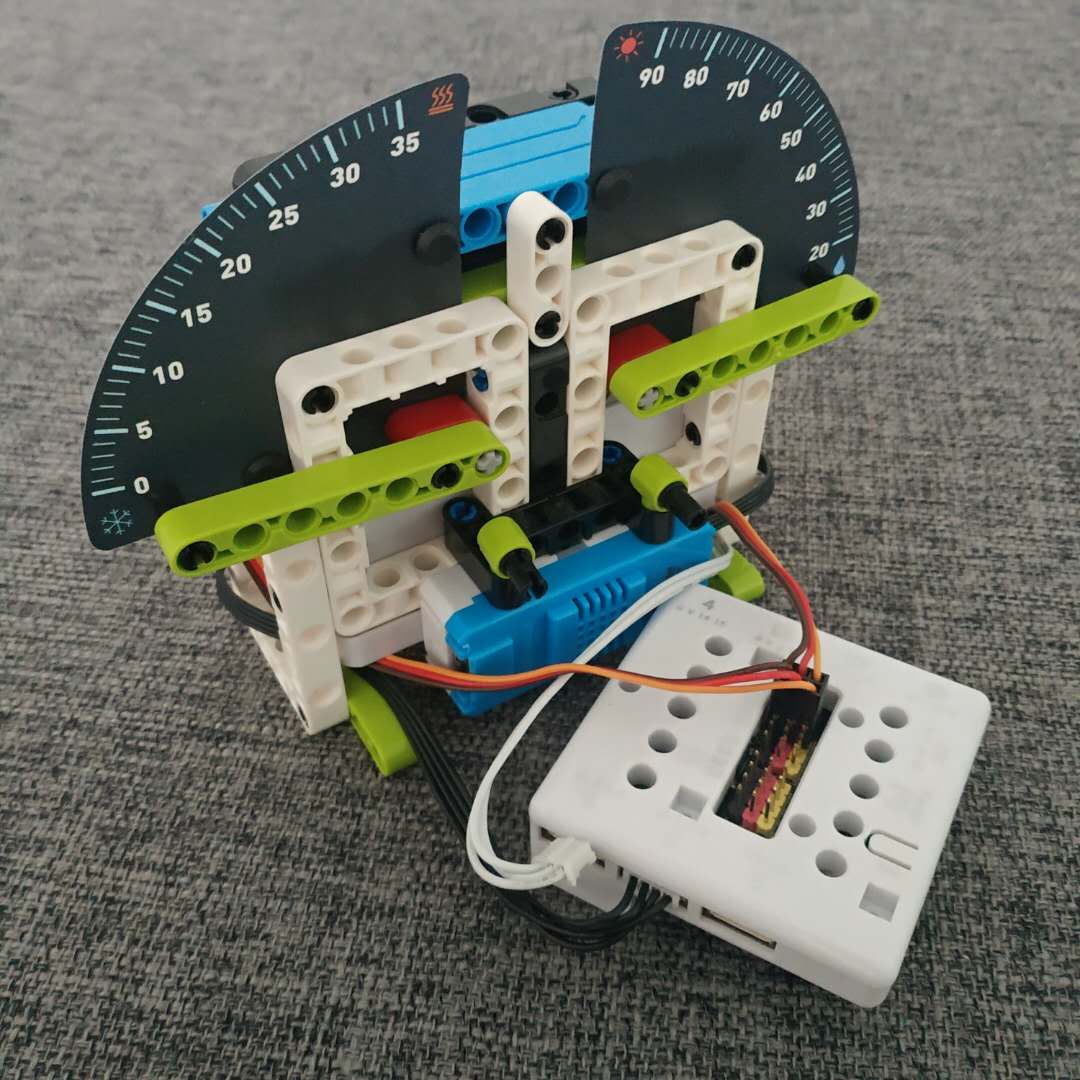
案例搭建
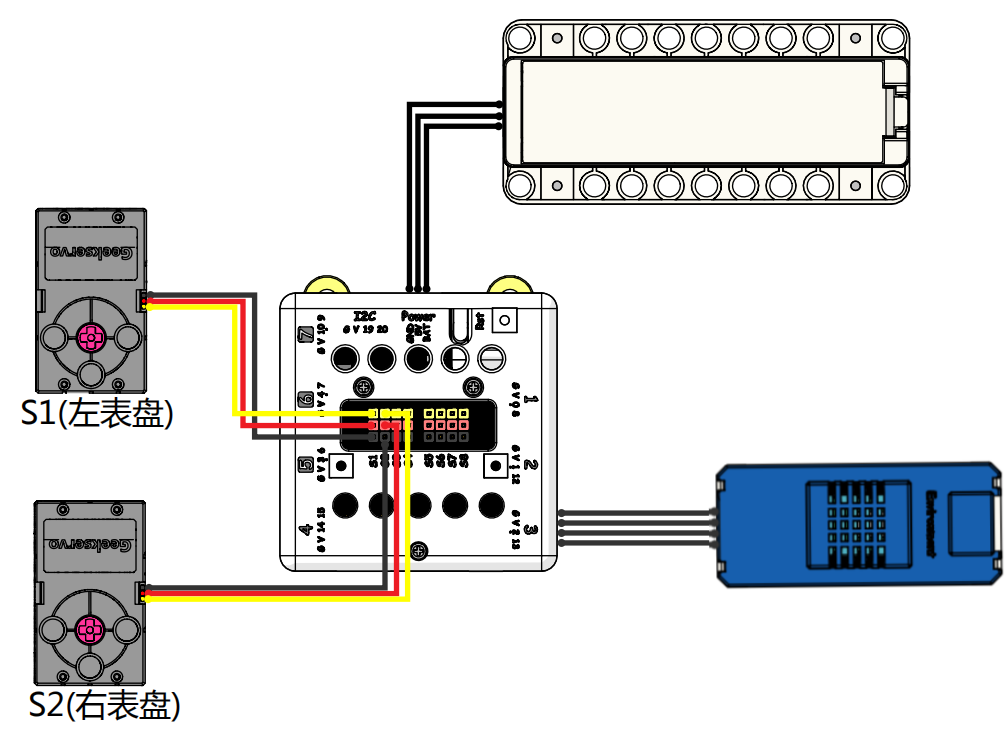
硬件接线
知识准备
温湿度传感器
本案例使用的温湿度传感器是dht11,是一种单总线数字信号传感器(所谓的单总线指的是不同与I2C和SPI这两种通信方式,使用单根线既传输时钟又传输数据,而且数据是双向的)
- 参数:
- 测量范围:湿度20~90%RH,温度0~50℃
- 测量精度:湿度±5%RH,温度±2℃
- 分辨率:湿度1%RH, 温度1℃
舵机和与角度映射
舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为0.5ms-2.5ms范围,总间隔为2ms。脉冲的宽度将决定马达转动的距离。例如:1.5ms的脉冲,电机将转向90度的位置(通常称为中立位置,对于180°舵机来说,就是90°位置)。如果脉冲宽度小于1.5毫秒,那么电机轴向朝向0度方向。如果脉冲宽度大于1.5毫秒,轴向就朝向180度方向。以180度舵机为例,对应的控制关系是这样的
危险
左侧 是温度对应的舵机接在S1 ,右侧是湿度 舵机接在S2 , 安装时程序写左边90度 右边0度 梁是横向安装,安装前先编写程序,让舵机转至该角度,再按如图安装
信息
本案例使用的舵机是一种宽角度舵机,同样的脉宽区间,可达到0~360°的宽区间
数值映射
数值映射是将某个范围变量的数值映射到另一个范围的算法,在本案例中,我需要们将温度和湿度的数值映射到舵机角度表盘。
- 区间映射公式

- 对应关系为:温度:0-35度,舵机的转动角度范围为90°-0° 湿度:90%-0% 舵机转动的角度为0°-90°
瞄家iot服务器配置
注册登录
- 👇点击下方网址可以直接跳转到瞄家的iot服务器;
https://iot.kittenbot.cn/ - 如果是第一次使用需要先注册一个KZone账号;
- 输入相关信息之后,点击按钮即可完成注册。;

- 之后再度回到https://iot.kittenbot.cn/输入注册好的账号密码之后点击登录即可;
创建话题
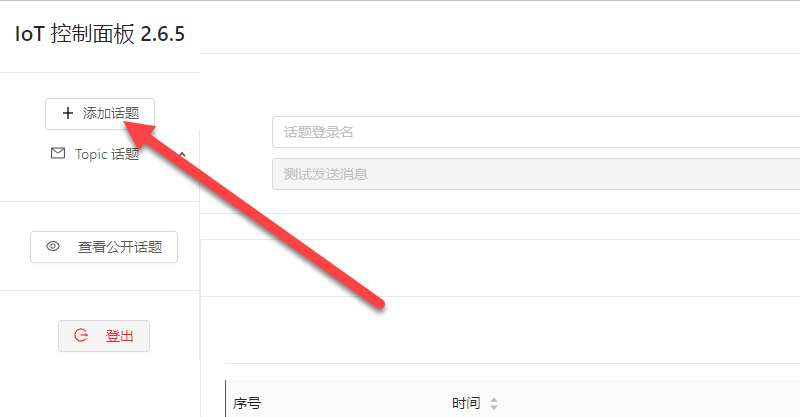
- 登陆成功之后点击首页的"添加话题";
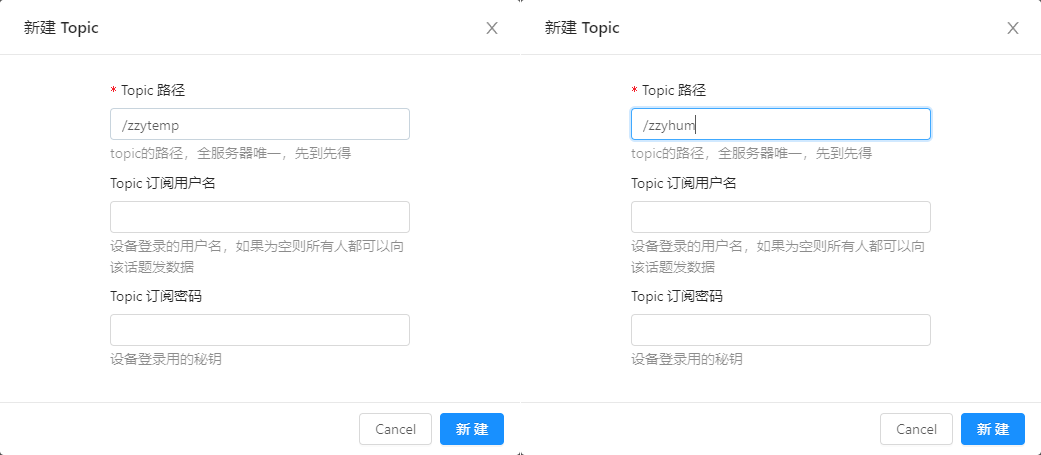
- 依次添加温湿度两个话题,为了避免重名,建议加上自己的名字简写;
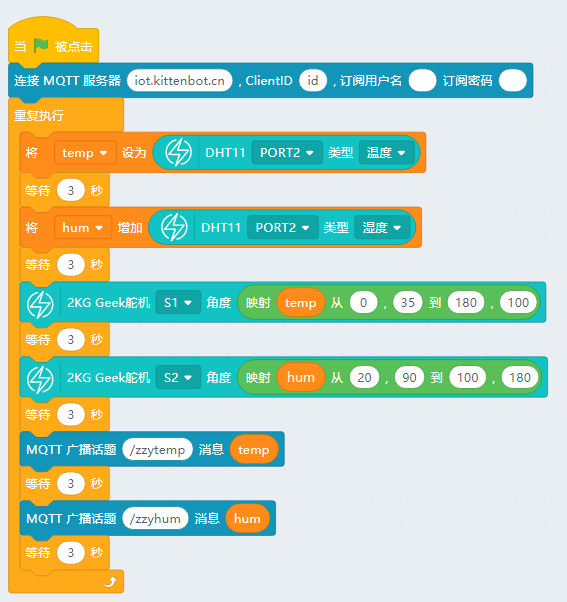
案例实现
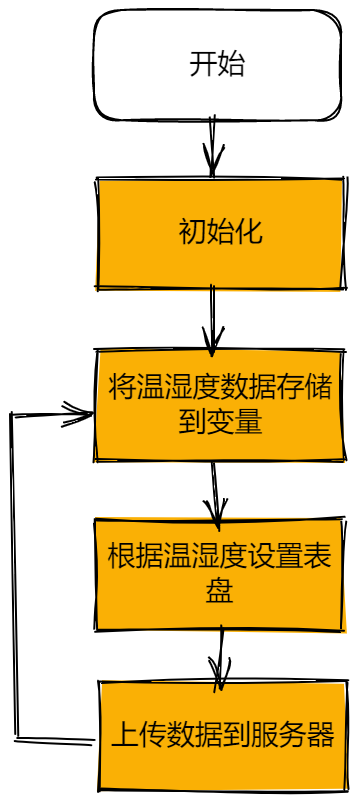
功能流程图
程序编写